Brandnew Info - 09/06/2022The results of an underwater force control experiment using Starlite’s “S-Bear DD” gear reducer were published in the report titled “a Submersible Geared Electric Motor without Waterproof Seals.”
On Friday, June 3, 2022, Assistant Professor Atsushi Kakogawa at Research Organization of Science and Technology, Ritsumeikan University presented a report on “a submersible geared electric motor without waterproof seals” at the ROBOMECH (The Robotics and Mechatronics Conference 2022).
(https://robomech.org/2022/ available only in Japanese)
Starlite’s gear reducer, S-Bear DD, was applied for the electric servo motor used for the research. We received the following recognition for its application; “S-Bear, made of high polymeric material, is possible to rotate smoothly without lubrication, and its structure allows easier submersion.” “Friction on the gear sliding area is small, so torque can be easily estimated from motor current.”
Starlite will continue to promote initiatives for the dissemination of not only service robots but also other devices such as exploration robots in submerged environments, utilizing S-Bear DD’s features.
Submersible geared electric motor
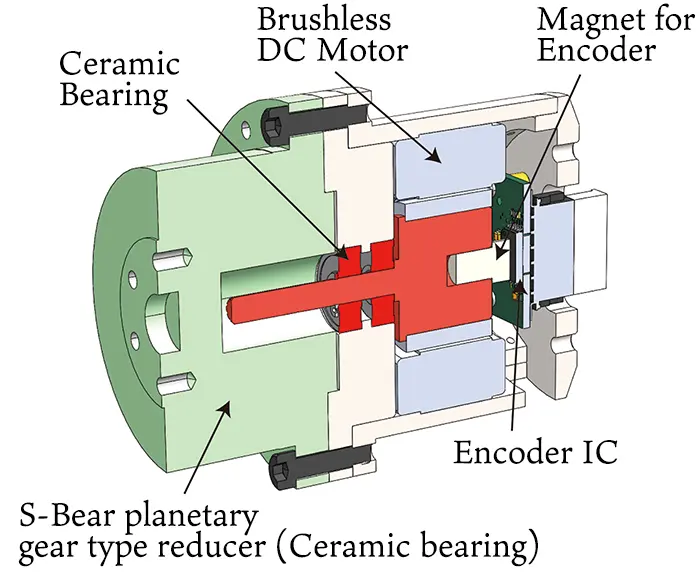
Cross-section of submersible geared electric servo motor
<Outline of S-Bear DD gear reducer used for the research>
Name of Product
S-Bear DD4830
Product Concept
By adopting a mechanism that is compact, flat, and obtains high torque, and by realizing smooth rotation without any lubrication by an original polymer material gear, it contributes to the dissemination of service and exploration robots under submerged environments.
Product Feature
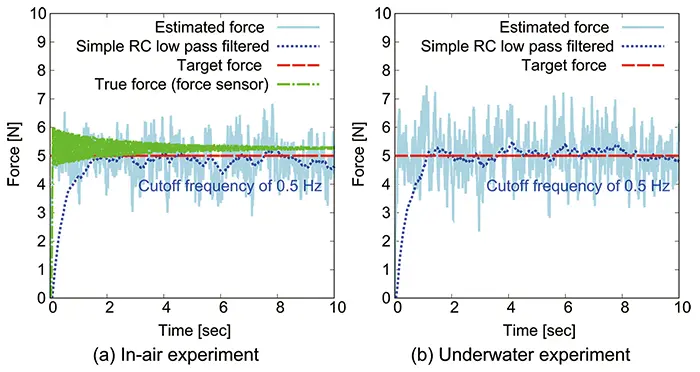
Compared to existing metal products, there are “two lightness” factors: the lightness of the product and back-drive torque. Additionally, lubrication and seals are not necessary because of its rust-resistant feature. There is room for improvement of accuracy, but it is possible to estimate torque on the joint and force from motor current even in a submerged environment. (sensor-less control in submerged environments)
<Experiment of Underwater Force Control using estimated torque from motor current>

Inquiry and Contact : https://starlite.co.jp/en/contact/
Recent Brandnew
- 04/06/2026Development of resin labyrinth seal to improve turbo compressor efficiency
- 01/06/2026Joint research with University of Fukui published in literature.
- 26/05/2026Starlite has received the 76th Industrial Technology Award from the Osaka Industrial Research Association.
- 29/10/2025Starlite's resin gears are used in the family robot, LOVOT.
- 16/09/2025Starlite provided technical cooperation for TJM Design's Sekhmet.